Hi all!
I’m also a lucky recipient of this really great board (thanks Radxa!). I’m sharing a few first-contact comments before I forget them:
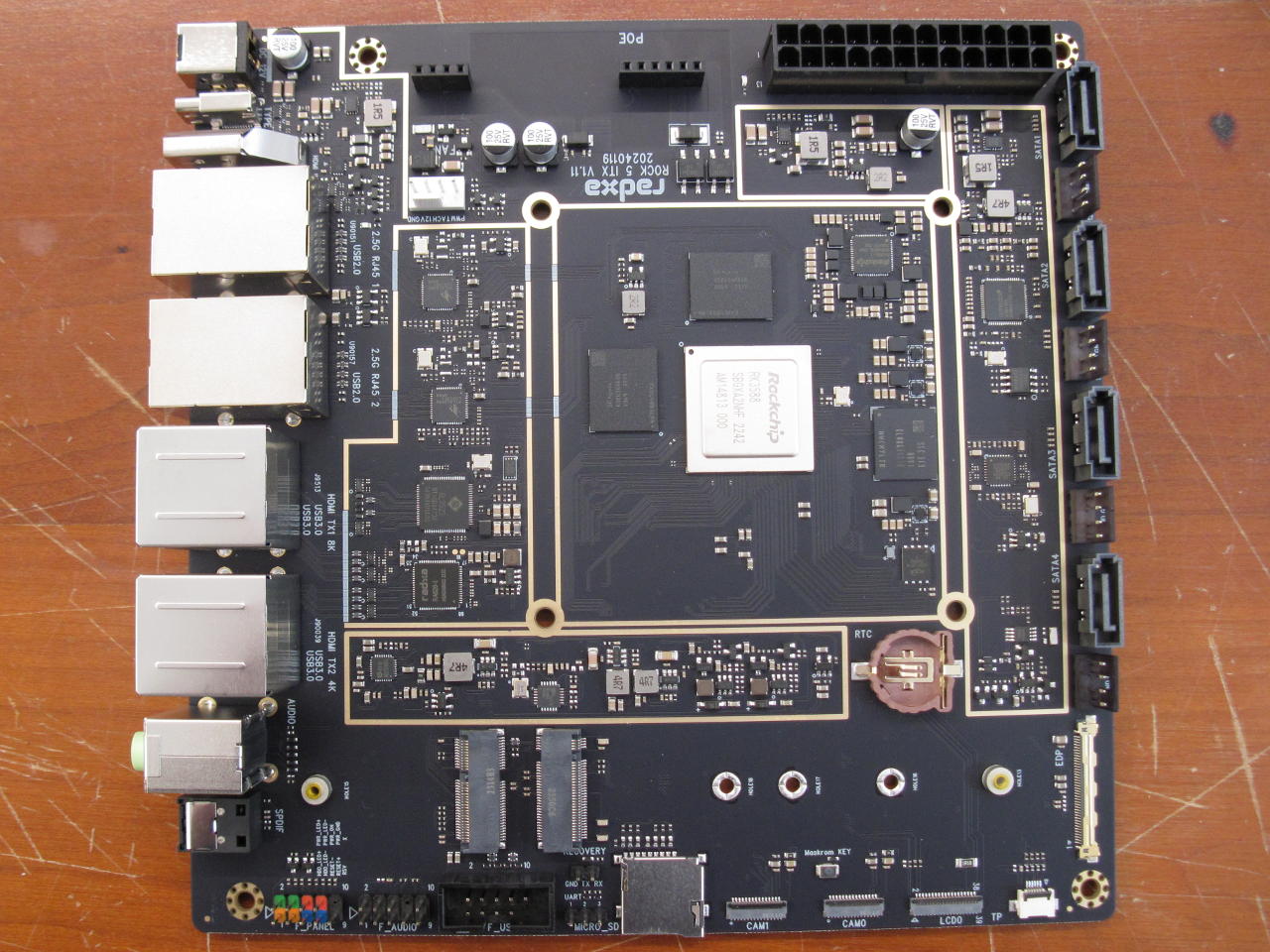
- the board looks amazingly clean and well arranged. I’m normally not sensitive to PCB colors but this black varnish that hides the copper tracks combined with all the golden pads makes me think of some high-end audio gear
 Those who love to have a window on their enclosures to exhibit their boards to friends will probably be proud to have something new to show:
Those who love to have a window on their enclosures to exhibit their boards to friends will probably be proud to have something new to show:
- the connectors and pinouts are well marked. For example you clearly see RJ45-1 and RJ45-2 etc, as well as the front panel’s pinout. That’s one of the advantage of the black paint, the white marking is perfect and uniform so you don’t have any doubt when reading anything:
- I think that a reset button close to the SPDIF connector (top right above) would be nice during testing or setup. For now I’m making shorts with a screwdriver on the f-panel connector.
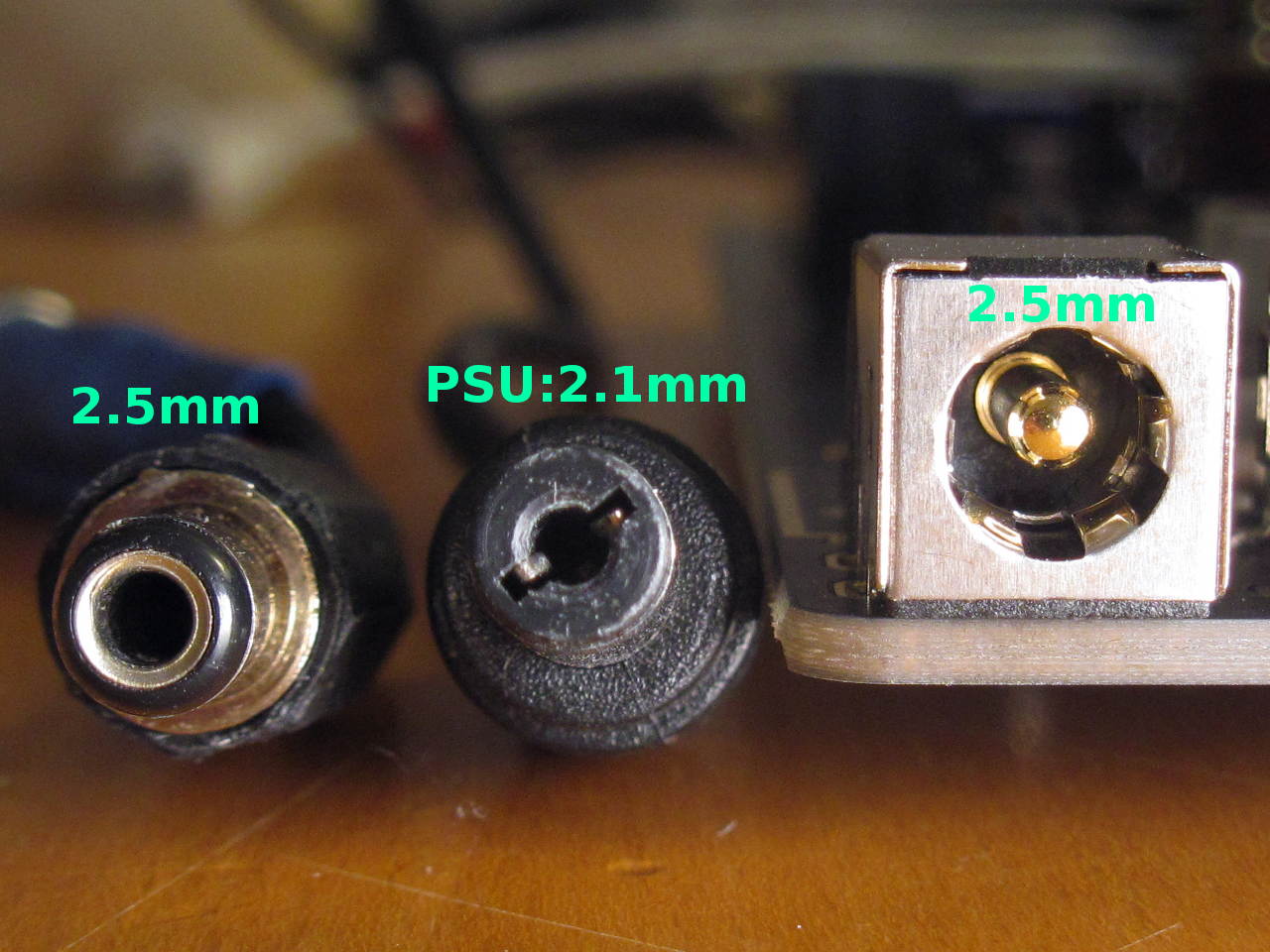
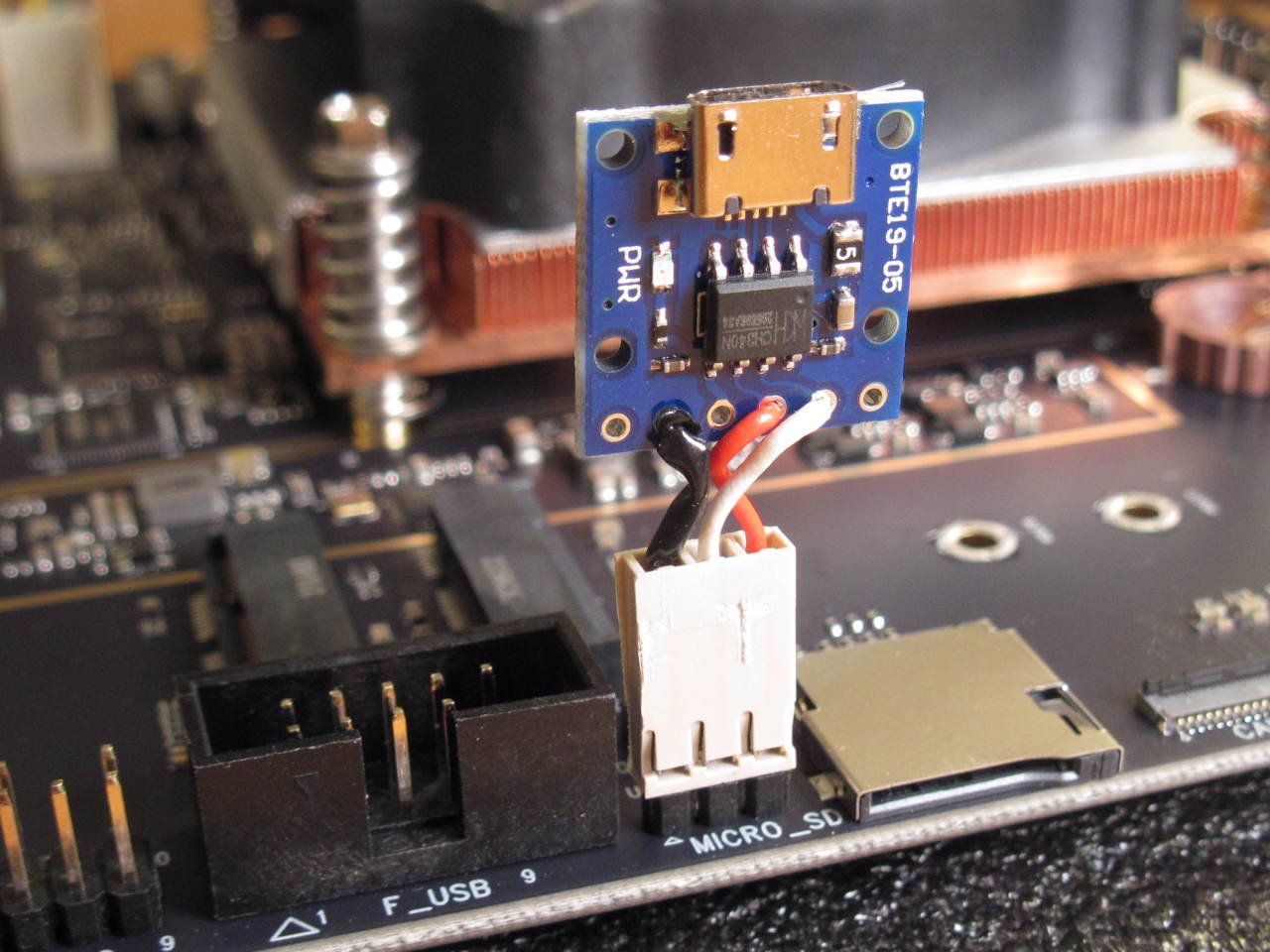
- I was surprised to find that the 12V in is on a 2.5mm connector. I searched among all my power blocks (20+) and couldn’t find even a single one in 2.5, all voltages included:
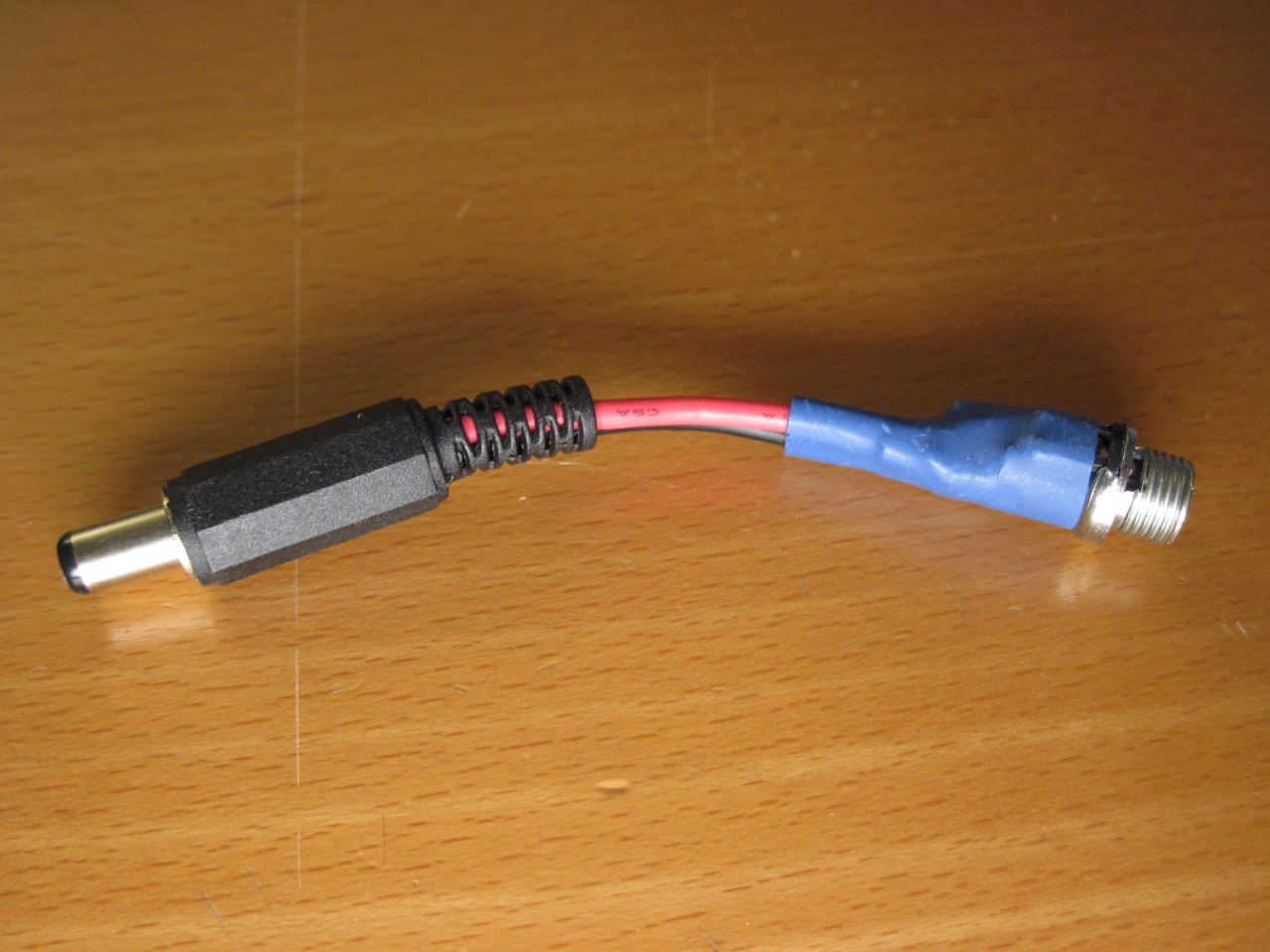
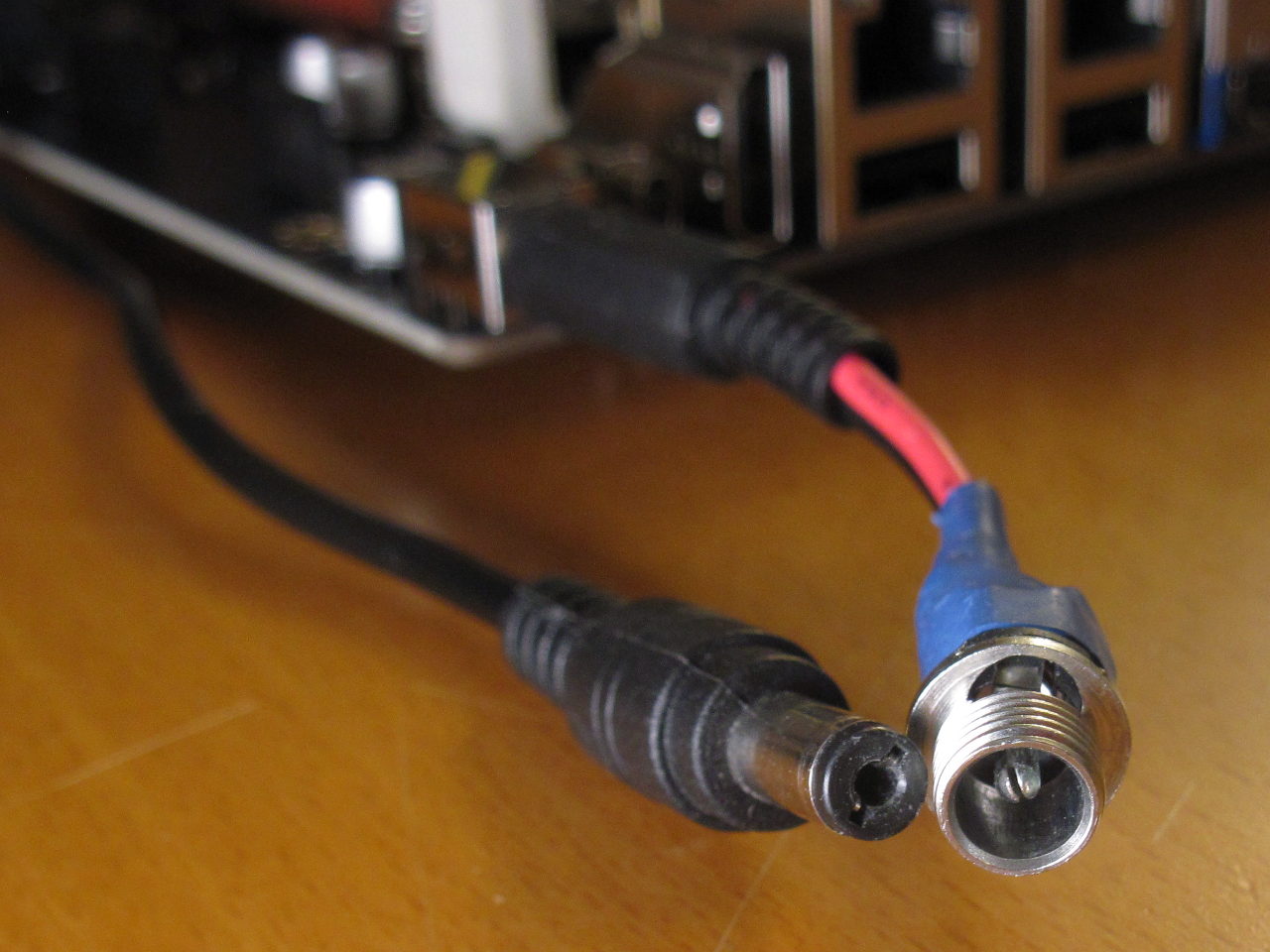
I found two salvaged male connectors coming from previous PSUs, so I connected one of them to a male 2.1mm connector to make an adapter:

As an alternative I could have used a 12V->ATX adapter since I have one but I preferred to test the board without extra components first.
-
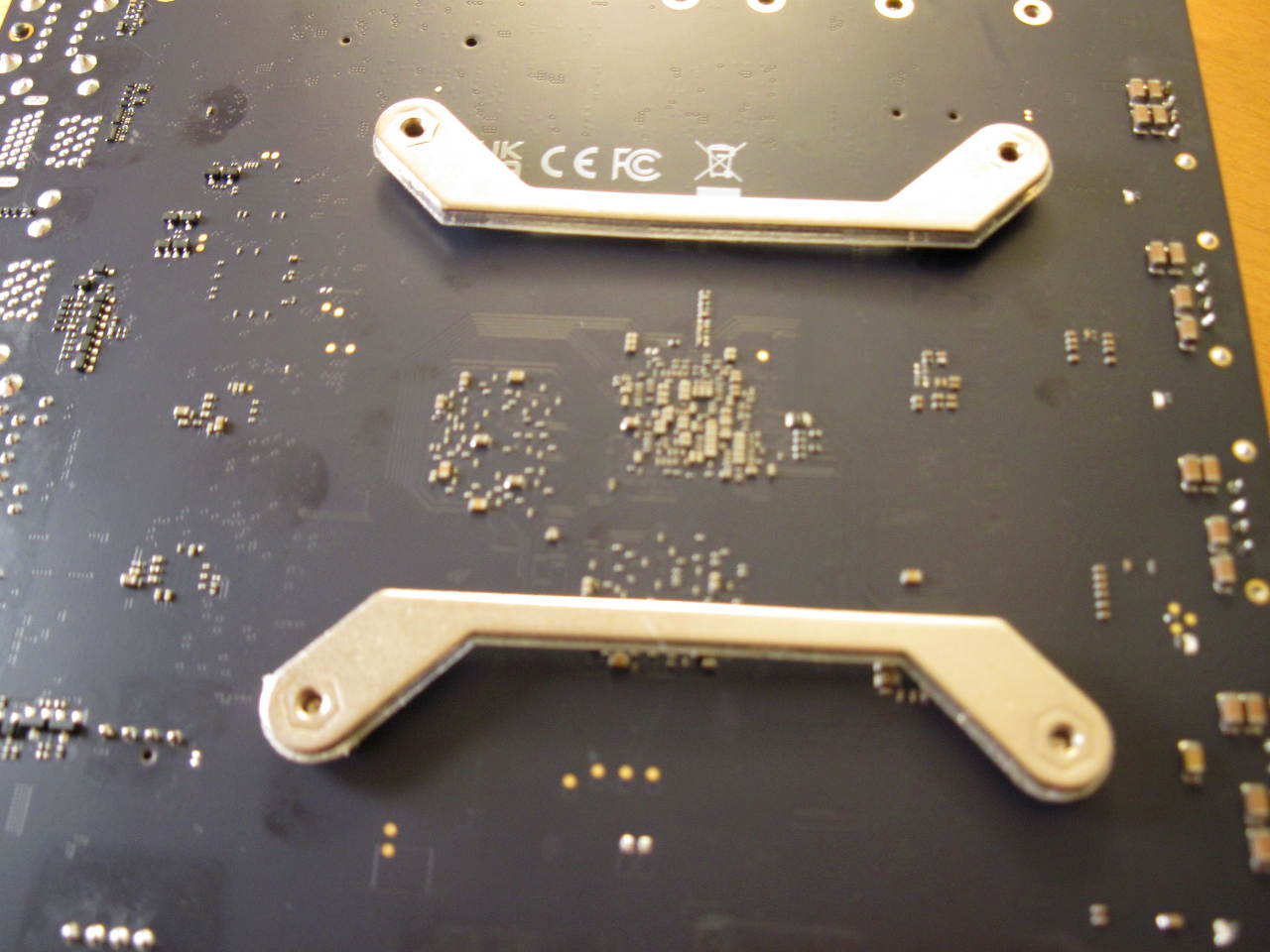
I thought it would be easier to find a heat sink, but I figured I didn’t seem to have the fixing back plate! I started the board without any heat sink and figured that it remains totally cool when idle. Regardless I managed to find one salvaged heat sink + fan + plate kit coming from two different devices that I could mount. I wanted to test it to see if the fan speed could be adjusted:
I think it could possibly be useful to maybe provide a default plastic plate + long pins that allow to attach “something” with a pair of elastics or serflexes for use during early tests, since it’s likely not going to heat much anyway. I noticed that the fan starts at full speed and its speed significantly drops at the end of the boot, likely when properly set up to only adapt to temperature maybe. -
The UART connector is ordered GND-TXD-RXD as more and more boards these days it seems, so I could directly connect a CH340-based adapter I’m using with some other boards and that supports the default 1.5 Mbauds of Rockchip chips:

So from a hardware perspective, that’s quite awesome.
However, for now I’m stuck. The system boots on a “roobi” system that I found on the site was a new pre-installer (good idea, that could definitely help). However, I end up with a login prompt and tried many login/password combinations (root, rock, roobi, radxa, even nothing and I don’t remember what), and nothing is accepted. I failed to find the info. I know I’m not good at finding such possibly obvious info but I searched an hour or so, which is already a bit too much for a login/password pair. (At least during this search the SoC remained totally cool without its heat sink). Thus any hint to log in would be more than welcome!
I looked at the boot loader and found that you have approx 1s to choose between 1 and 2 (both end up with this login prompt, the second saying that root account is locked, maybe I did too many attempts?):
Cannot open access to console, the root account is locked.
See sulogin(8) man page for more details.
Press Enter to continue.
...
Debian GNU/Linux 11 roobi ttyFIQ0
roobi login:
It’s also possible to interrupt the boot by pressing Ctrl-C instead of choosing 1 or 2 and end up in u-boot. Partitions 1 and 2 seem to be FAT, part 3 is ext2/3/4 and u-boot by default accesses its kernel there from /boot. But for now I didn’t manage to boot it by hand to pass args and bypass the login.
There are some bluetooth hci0 timeout errors that pollute the console for one minute or so and after that they’re gone.
That’s all for this evening. Once I manage to log into it, I’ll be interested in giving it a try with an M.2 10GbE NIC I bought not long ago, and with 4 SSDs.